

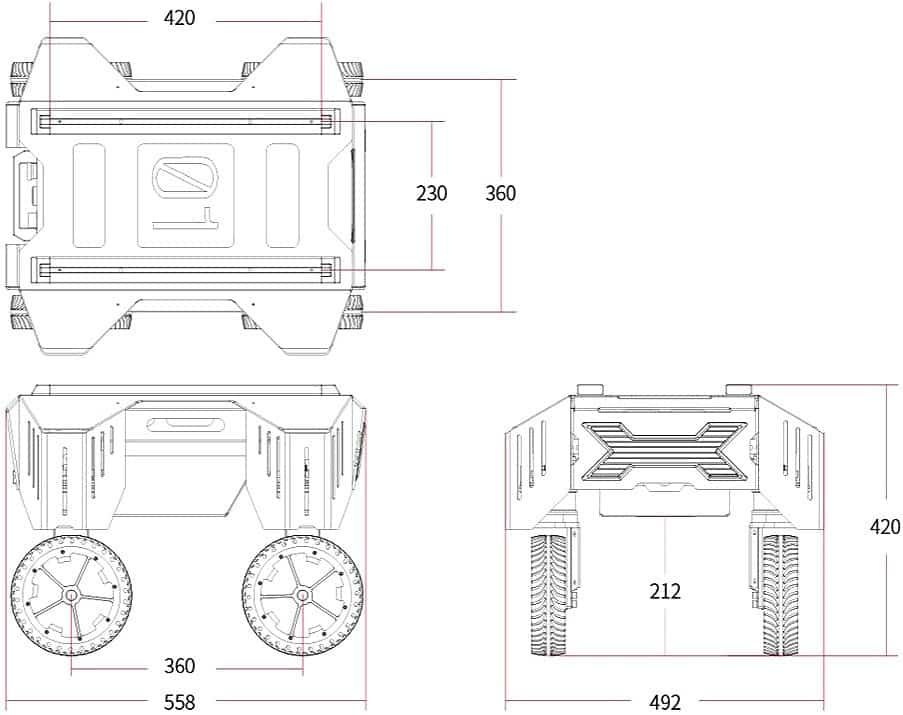
200mm 지상고, 10° 상승 능력 (완전 부하)
50kg 운반 용량

5시간 작동
빠른 배터리 교체


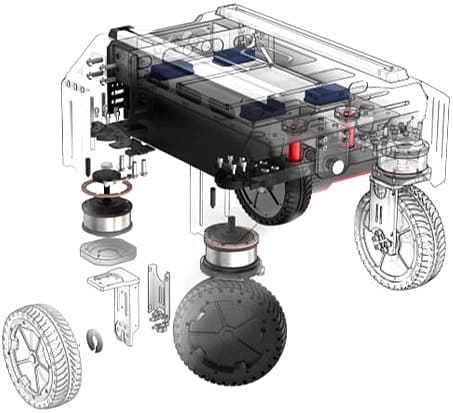
슬라이드 레일은 빠른 건물 상단 부하 (감지, 산업 제어, IMU, 라우팅, 카메라 등)를 위해 예약되어 있습니다.

센서 Al 프로파일 브라켓의 맞춤형 설계 지원

고급 자동 주행 시스템(예: ROS, Apollo 등)의 액세스를 지원합니다.






200mm 지상고, 10° 상승 능력 (완전 부하)
50kg 운반 용량
5시간 작동
빠른 배터리 교체
슬라이드 레일은 빠른 건물 상단 부하 (감지, 산업 제어, IMU, 라우팅, 카메라 등)를 위해 예약되어 있습니다.
센서 Al 프로파일 브라켓의 맞춤형 설계 지원
고급 자동 주행 시스템(예: ROS, Apollo 등)의 액세스를 지원합니다.