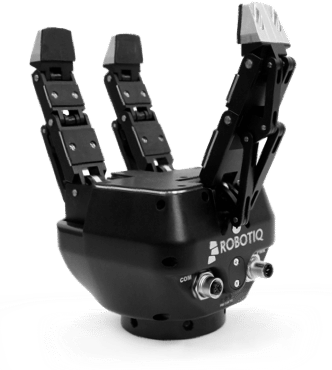

4 grip types
-Pinch Mode -Wide Mode -Scissor Mode -Basic Mode
Control fingers separately
각 손가락에서 피드백 받기

Plug + Play
Gripper URCap으로 단 몇 분 만에 로봇 설치와 프로그래밍 가능




-Pinch Mode -Wide Mode -Scissor Mode -Basic Mode
각 손가락에서 피드백 받기
Gripper URCap으로 단 몇 분 만에 로봇 설치와 프로그래밍 가능